Stefanie WalzI am a PhD student within the Perception Group for Autonomous Driving of Mercedes-Benz. Supervised by Bernt Schiele from Max Planck Institute for Informatics and Felix Heide from Princeton University, my research focuses on 3D computer vision. I have a M.Sc. in Communications and Computer Engineering and a B.Sc. in Electrical Engineering from Ulm University. My master's thesis was honored with the Sponsorship Award from the VDI (Association of German Engineers). Additionally, during my studies, I was the recipient of the Germany Scholarship (2016-2017) and the Rolf-and-Lieselotte-Glaser-Foundation Scholarship (2017-2019). |
 |
UpdatesApril 2024 | Gated RCCB Stereo was selected as a highlight at CVPR 2024 (top 11.9%). February 2024 | Our papers Gated Fields and Gated RCCB Stereo were accepted at CVPR 2024. July 2023 | ScatterNeRF was accepted at ICCV 2023. March 2023 | Our paper was selected as a highlight at CVPR 2023 (top 2.5%). February 2023 | Gated Stereo was accepted at CVPR 2023. MoreMarch 2022 | Our paper Gated Stereo was accepted as an oral at CVPR 2022. |
ResearchI'm interested in computer vision, deep learning, generative AI, and image processing. |
|
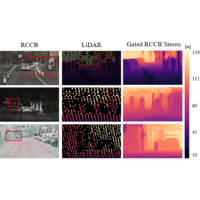
Samuel Brucker, Stefanie Walz, Mario Bijelic, Felix Heide CVPR (Highlight), 2024 [website] [code] [paper] Gated RCCB Stereo is a stereo-depth estimation method that is capable of exploiting multi-modal multi-view depth cues from RCCB and gated stereo images. We combine complementary cross-spectral features within an iterative stereo matching network and achieve accurate depth estimates for ranges up to 220m. |
|
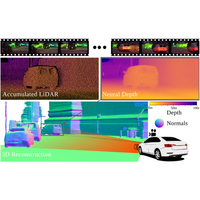
Andrea Ramazzina*, Stefanie Walz*, Pragyan Dahal, Mario Bijelic, Felix Heide CVPR, 2024 [website] [code] [paper] We propose a neural rendering approach that seamlessly incorporates time-gated capture and illumination. Our method exploits the intrinsic depth cues in the gated videos, achieving precise and dense geometry reconstruction irrespective of ambient illumination conditions. |

|
Andrea Ramazzina, Mario Bijelic, Stefanie Walz, Alessandro Sanvito, Dominik Scheuble, Felix Heide ICCV, 2023 [website] [code] [paper] We learn a foggy scene from a single video, disjointly representing scattering volume and scene objects through physics-inspired losses. This allows for accurate rendering of novel views with full control over the scattering volume with accurate estimation of the 3D scene. |

|
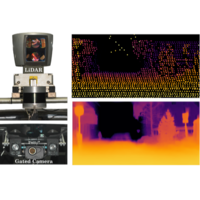
Stefanie Walz, Mario Bijelic, Andrea Ramazzina, Amanpreet Walia*, Fahim Mannan, Felix Heide CVPR (Highlight), 2023 [website] [code] [paper] We propose Gated Stereo, a high-resolution and long-range depth estimation technique that operates on active gated stereo images. |
|
Amanpreet Walia*, Stefanie Walz*, Mario Bijelic, Fahim Mannan, Frank Julca-Aguilar, Michael Langer, Werner Ritter, Felix Heide CVPR (Oral), 2022 [website] [code] [paper] Gated2Gated is a self-supervised depth estimation method that uses gated and temporal depth cues as training signals. The proposed model is trained end-to-end from gated video sequences and learns to estimate absolute depth values without LiDAR supervision. |
|
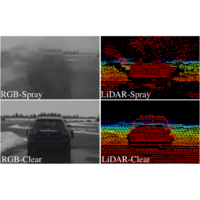
Stefanie Walz, Mario Bijelic, Florian Kraus, Werner Ritter, Martin Simon, Igor Doric ITSC, 2021 [arxiv] We propose a novel testing methodology for spray disturbances. It introduces a novel lightweight and configurable spray setup, alongside an evaluation scheme designed to assess the disturbances caused by spray. |
|
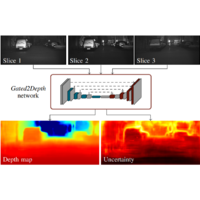
Stefanie Walz, Tobias Gruber, Werner Ritter, Klaus Dietmayer, ITSC, 2020 [arxiv] We extend gated depth estimation frameworks with an additional confidence measure, for more interpretable depth estimates. This confidence measure allows us to filter out uncertain depth predictions to improve the overall accuracy of the model. |
|
Source code stolen from Leonid Keselman's Jekyll fork of Jon Barron's public academic website. |